It is a core underlying assumption of both special and general
relativity—indeed of much of physics—that spacetime is a continuum: to
characterise an event we need four numbers (one temporal, three
spatial). In special relativity this continuum is the familiar flat
\(\mathbb{R}^{4}\), but in general
relativity the geometry itself is dynamical—it changes in response to
the distribution of matter, energy, and stress throughout the
universe.
Because we now allow the geometry to be curved and dynamical, we need
a mathematical apparatus to describe and quantify the situation
precisely; without it we would be limited to qualitative remarks,
whereas in physics we want to make sharp, falsifiable predictions. One
approach would be to model curved continua as surfaces embedded in a
higher-dimensional ambient space \(\mathbb{R}^{m}\). This works, but it raises
an uncomfortable question: do these extra dimensions exist? We sidestep
the issue entirely by studying curved continua intrinsically,
without reference to any ambient space—and this leads us to the theory
of manifolds.
Physical intuition
In general relativity, spacetime is a manifold ℳ. Although we may picture ℳ as sitting inside some higher-dimensional
ℝm, all physically
meaningful statements should be intrinsic: they must not depend on the
embedding. The intrinsic approach requires more formalism upfront, but
it is ultimately more natural and more transferable to other areas of
theoretical physics.
Notation and prerequisites
We work in \(n\) dimensions
throughout. One might ask: why bother with arbitrary \(n\) when spacetime is four-dimensional?
There are several good reasons. First, it costs almost no extra effort
and yields considerable generality for free. Second, we often wish to
restrict attention to dynamics on a lower-dimensional hypersurface (a
particle constrained to the surface of a sphere, for instance).
Third—and more speculatively—there are indications from quantum gravity
(the holographic principle, for example) that the effective dimension of
spacetime may itself be emergent. Finally, in a quantum theory of
gravity one might need to superpose spacetimes of different dimensions,
so it is wise not to hard-code \(n=4\).
For \(\boldsymbol{x} =
(x^1,\dots,x^n)\), the Euclidean norm is \[\lVert \boldsymbol{x}-\boldsymbol{y} \rVert
= \Bigl(\sum_{j=1}^{n}(x^j -
y^j)^2\Bigr)^{1/2}.\]
The open ball of radius \(r\) about \(\boldsymbol{y}\) is \[B_r(\boldsymbol{y})
= \{\boldsymbol{x}\in\mathbb{R}^{n} \mid \lVert
\boldsymbol{x}-\boldsymbol{y} \rVert < r\}.\]
A subset \(U\subseteq\mathbb{R}^{n}\) is open
if for every \(\boldsymbol{x}\in U\)
there exists \(\varepsilon > 0\)
such that \(B_\varepsilon(\boldsymbol{x})\subset
U\).
\(C^k\) denotes the set of \(k\)-times continuously differentiable
functions (from \(\mathbb{R}^{n}\) to
\(\mathbb{R}\), or between open subsets
thereof): all partial derivatives of order \(\le k\) exist and are continuous.
An n-dimensional, C∞, real
manifoldℳ is a set
together with a collection {Oα} of subsets
satisfying:
ℳ is a topological space
(Hausdorff and second-countable).1
The subsets {Oα}coverℳ, i.e. ⋃αOα = ℳ.
Equivalently: for every p ∈ ℳ
there exists at least one α
with p ∈ Oα.
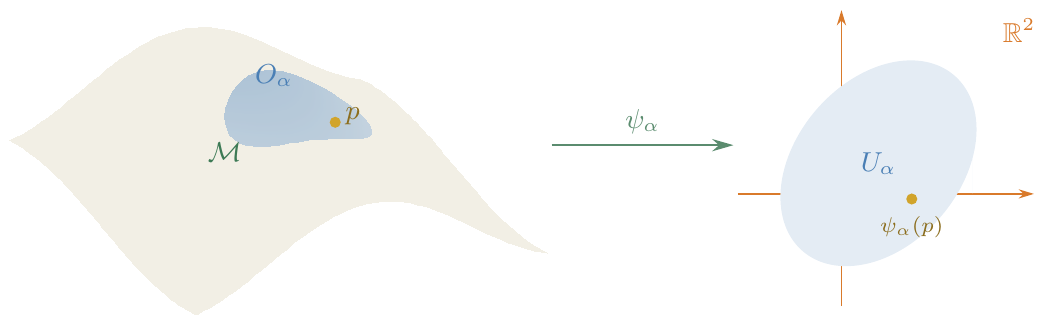
For each α there is a
homeomorphismψα : Oα → Uα , Uα ⊂ ℝn (open) ,
A single chart. Chart ψα : Oα → Uα ⊂ ℝ² identifies a patch of the manifold with an open set in Euclidean space.
One should think of each pair (Oα,ψα)
as identifying a piece of the manifold with a piece of Euclidean space.
A manifold is thus built up—sewn together—from patches of ℝn.
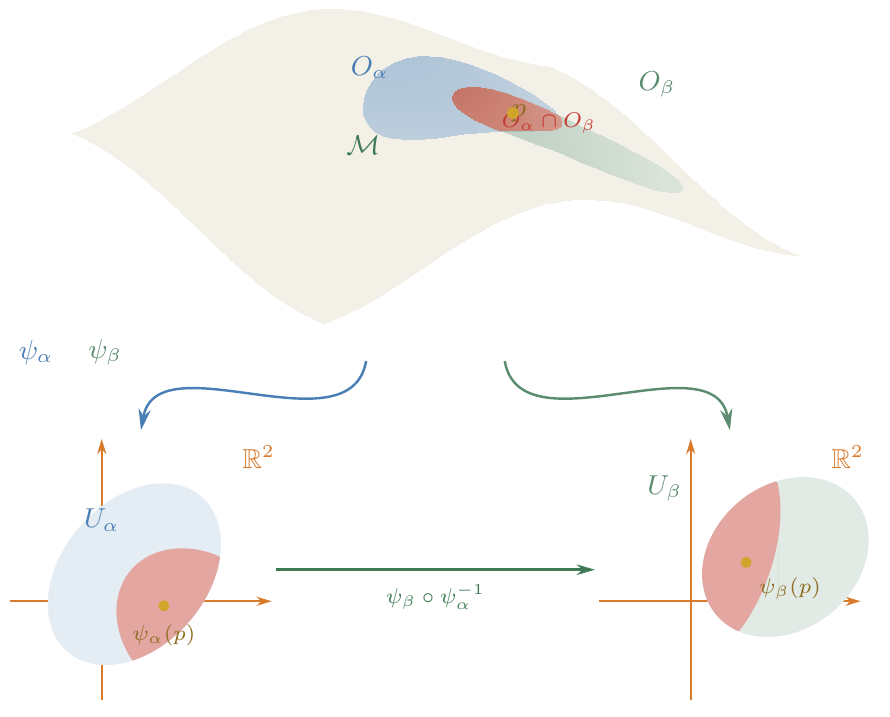
If any two sets Oα and Oβoverlap, i.e. Oα ∩ Oβ ≠ ⌀,
then the transition mapψβ ∘ ψα−1 : ψα[Oα∩Oβ] → ψβ[Oα∩Oβ]
(which is a map between open subsets of ℝn) is C∞. This condition
governs the gluing: wherever two patches overlap, the two
coordinate descriptions must be smoothly related.
Two overlapping charts and the transition map. Charts (Oα, ψα) and (Oβ, ψβ) with overlap Oα ∩ Oβ (red) on the manifold, and the transition map ψβ ∘ ψα−1 between open subsets of ℝ².
Interactive: Two intersecting charts on a manifold
Drag the gold point p around ℳ.p = (0.10, 0.00)OαOβOα∩OβOpen full page →
Charts and atlases
The maps \(\psi_\alpha\) are called
charts (in mathematics) or coordinate
systems (in physics).
The definition as stated depends on the choice of cover \(\{O_\alpha\}\) and charts \(\{\psi_\alpha\}\). Adding a new chart \(\psi'\) compatible with the existing
ones would formally give a “new” manifold, even though it carries no new
information. To eliminate this ambiguity we require the atlas \(\{\psi_\alpha\}\) to be
maximal: all coordinate systems compatible
with conditions (2) and (3) are included.
Physical intuition
Requiring maximality is a bookkeeping device. In practice one
specifies a convenient atlas and declares that every compatible chart is
implicitly included.
Examples
\(\mathbb{R}^{n}\) as a manifold
\(\mathbb{R}^{n}\) is the trivial
example: it can be covered by a single chart \(O_1 = \mathbb{R}^{n}\), \(\psi_1 = \id\). As a manifold, \(\mathbb{R}^{n}\) has uncountably many
compatible covers (any collection of open sets that covers \(\mathbb{R}^{n}\), together with the
identity or other smooth maps, will do).
Spacetime
Minkowski spacetime is \(\mathbb{R}^1\times\mathbb{R}^3 \cong
\mathbb{R}^{1,3} \cong \mathbb{R}^{4}\) as a manifold. (The
Lorentzian structure—the metric signature—comes later.)
The sphere \(S^n\)
The \(n\)-sphere is \[\label{eq:Sn-def}
S^n = \bigl\{(x^1,\dots,x^{n+1})\in\mathbb{R}^{n+1}
\;\big|\; \textstyle\sum_{j=1}^{n+1}(x^j)^2 = 1\bigr\}.\]\(S^n\) cannot be covered by a single
chart (it is compact, while any chart image is an open subset of \(\mathbb{R}^{n}\)). Define the \(2(n{+}1)\) open sets \[\label{eq:Sn-open-sets}
O_k^+ = \{(x^1,\dots,x^{n+1})\in S^n \mid x^k > 0\}\,,
\qquad
O_k^- = \{(x^1,\dots,x^{n+1})\in S^n \mid x^k < 0\}\,,\] for
\(k = 1,\dots,n{+}1\). These cover
\(S^n\). The corresponding charts are
\[\label{eq:Sn-charts}
\psi_k^\pm : O_k^\pm \to \mathbb{R}^{n}\,,
\qquad
\psi_k^\pm(x^1,\dots,x^{n+1})
= (x^1,\dots,x^{k-1},x^{k+1},\dots,x^{n+1})\,,\] i.e. one
simply drops the \(k\)-th coordinate
(whose sign is determined by the choice of \(O_k^\pm\)).
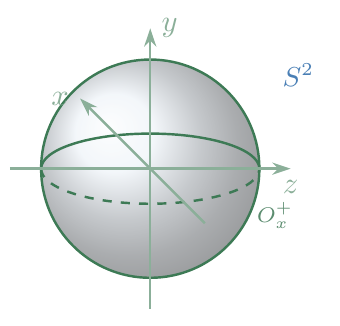
Special case: \(S^2\). Consider the charts \(\psi_x^+\) (drop \(x\), restricted to \(x>0\)) and \(\psi_y^-\) (drop \(y\), restricted to \(y<0\)). On the overlap \(\{(y,z)\in\mathbb{R}^{2} \mid y<0,\;
y^2+z^2<1\}\), the transition function is \[(\psi_y^-\circ(\psi_x^+)^{-1})(y,z)
= \bigl(\sqrt{1-y^2-z^2},\; z\bigr).\]
The 2-sphere S² with chart patch Ox+. Stereographic-style axes in ℝ³ and the open upper-x hemisphere Ox+ = {(x,y,z)∈S² : x > 0}, one of the six coordinate-halving charts of S².
Exercise
Find
the remaining transition functions for the atlas {ψk±}
of Sn and
show that they are all C∞.
Physical intuition
For many basic solutions of Einstein’s field equations the underlying
manifold is simply ℝ4—only
the geometry (the metric) varies. So one might wonder whether the full
manifold machinery is really necessary. The answer is yes: as
soon as one considers cosmological spacetimes (which may be compact,
like S3 × ℝ) or
black hole spacetimes (which have non-trivial causal structure and
topology), more general manifolds become unavoidable. In quantum gravity
one may even wish to sum over manifolds of different topologies, making
this generality essential.
New manifolds from
old: product manifolds
Suppose \(\mathcal{M}\) and \(\mathcal{M}'\) are manifolds of
dimension \(n\) and \(n'\), respectively. We can form the
product manifold\(\mathcal{M}\times\mathcal{M}'\).
Let \(\psi_\alpha: O_\alpha\to
U_\alpha\) and \(\psi'_\beta:
O'_\beta\to U'_\beta\) be charts for \(\mathcal{M}\) and \(\mathcal{M}'\). Define charts for \(\mathcal{M}\times\mathcal{M}'\) via
\[\psi_{\alpha\beta}: O_\alpha\times
O'_\beta
\;\to\; U_\alpha\times U'_\beta
\;\subset\; \mathbb{R}^{n+n'}\,,\] with \[\label{eq:product-chart}
\psi_{\alpha\beta}(p,p')
= \bigl(\psi_\alpha(p),\;\psi'_\beta(p')\bigr)
\;\in\; \mathbb{R}^{n+n'}\,.\]
Exercise
Verify that ℳ × ℳ′ with the charts
{ψαβ}
satisfies the manifold axioms.
With just ℝ and Sn and their
products, one can construct many of the manifolds relevant to general
relativity.
Smooth maps and
diffeomorphisms
Let \(\mathcal{M}\) and \(\mathcal{M}'\) be manifolds with charts
\(\{\psi_\alpha\}\) and \(\{\psi'_\beta\}\).
Definition
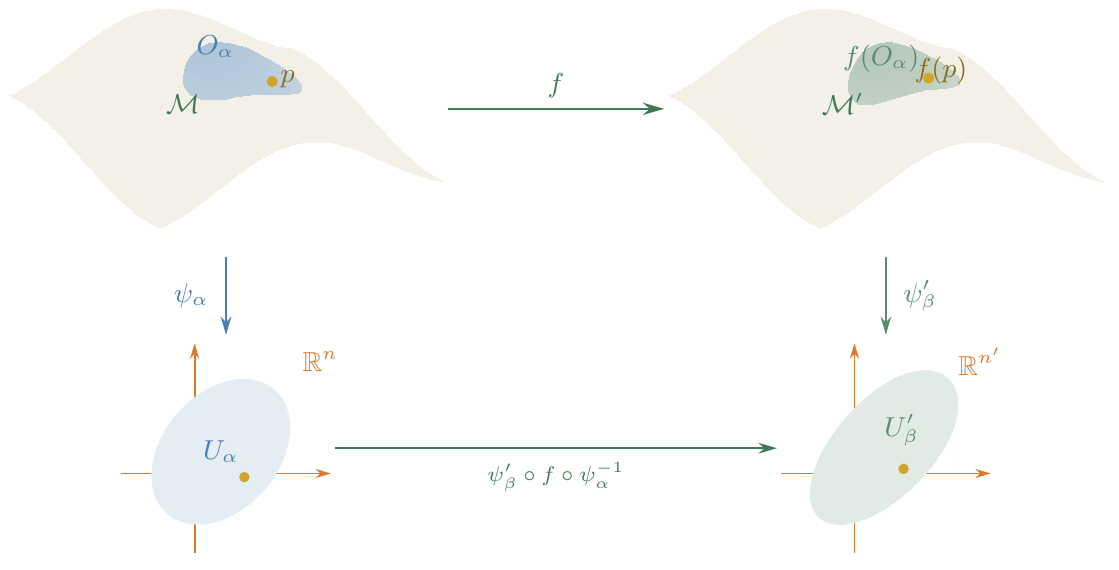
A map f : ℳ → ℳ′ is said to be C∞ (smooth) if
for all α, β the
composite ψ′β ∘ f ∘ ψα−1 : Uα → U′β
is C∞ (as a map
between open subsets of Euclidean spaces).
A smooth map between manifolds and its chart representative. The smooth map f : ℳ → ℳ′ viewed through charts ψα and ψ′β; the composite ψ′β ∘ f ∘ ψα−1 must be smooth as a map between open subsets of Euclidean space.
Definition
A
map f : ℳ → ℳ′ is a
diffeomorphism if it is C∞, one-to-one, onto, and
its inverse f−1 is
also C∞. If such a
map exists, ℳ and ℳ′ are said to be
diffeomorphic: they have identical manifold
structure.
Vectors on manifolds
Euclidean space \(\mathbb{R}^{n}\)
(and Minkowski space) carries a natural global vector space
structure: \(V = \mathbb{R}^{n}\) is
simultaneously a manifold and a vector space.
For a general manifold this is no longer true—there
is no natural additive structure. This is an instance of a general
phenomenon: when one generalises a definition so that it applies to more
examples, some of the structure enjoyed by the original example is
inevitably lost. Euclidean space is simultaneously a manifold, a vector
space, and a group; a generic manifold is none of the latter two.
Example
The 2-sphere S2
is a manifold, but it is not a vector space: there is no
natural way to “add” two points on S2 and obtain another
point on S2.
We want to preserve as much of this vector-space structure as
possible, because without vectors we cannot write down equations of
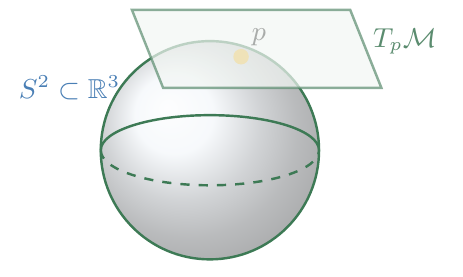
motion for test particles. The key observation is that even though \(S^2\) is not globally a vector space, at
each point \(p\) there is still a
natural local vector space—the tangent plane—and this idea
generalises to arbitrary manifolds.
It is, however, still possible to associate a vector space to each
point of a manifold. For a manifold \(\mathcal{M}\) embedded in \(\mathbb{R}^{m}\) (such as \(S^2\subset\mathbb{R}^{3}\)), one can
visualise the tangent plane at a point \(p\):
Tangent plane to the 2-sphere at a point. Visualising Tpℳ for S² ⊂ ℝ³. The plane is what one reaches for when the manifold sits inside an ambient space — but this picture relies on the embedding, so the next lecture gives an intrinsic definition.
But we want an intrinsic definition, independent of any
embedding.
Key result
The picture above relies on the embedding S2 ⊂ ℝ3, which
we have declared off-limits. The solution is a pleasant roundabout: one
first observes that there is a one-to-one correspondence between tangent
vectors and directional derivatives of smooth functions, and
then notes that directional derivatives can be defined using only the
manifold structure—no embedding required. We therefore define
tangent vectors as directional derivatives. This is developed in the
next lecture.
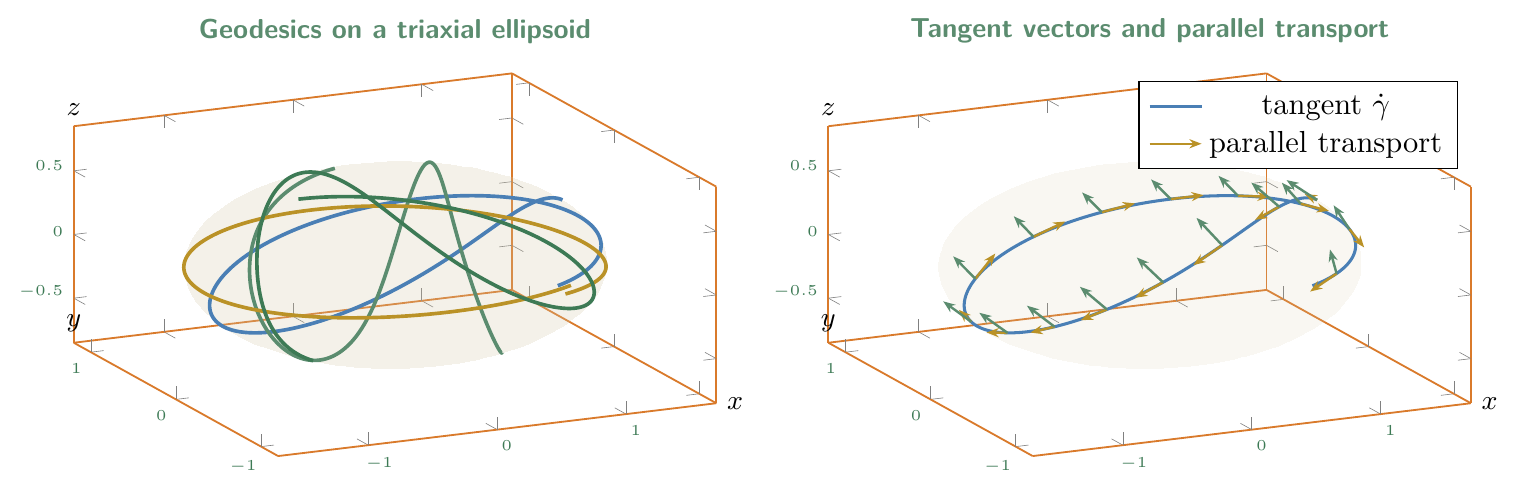
Geodesics on a triaxial ellipsoid with parallel transport. Top: geodesics (shortest paths intrinsic to the surface) on a triaxial ellipsoid (a=1.5, b=1.0, c=0.7). Bottom: tangent vectors (gold) and a parallel-transported vector (teal) along a geodesic — parallel transport preserves inner products but the transported vector rotates relative to the tangent direction.
Formal definitions (summary)
We collect the precise versions of the definitions introduced above
for reference.
Definition
A
locally Euclidean space of dimension d is a Hausdorff topological
space ℳ such that every point has a
neighbourhood homeomorphic to an open subset of ℝd.
Definition
A
differentiable structureℱ of class Ck (1 ≤ k ≤ ∞) on a locally Euclidean
space ℳ is a collection of coordinate
systems {(Oα,ψα) ∣ α ∈ A}
such that:
⋃α ∈ AOα = ℳ.
ψα ∘ ψβ−1
is Ck for
all α, β ∈ A.
The collection ℱ is maximal with
respect to (b).
A \(d\)-dimensional
differentiable manifold of class \(C^k\) is a pair \((\mathcal{M},\mathcal{F})\) consisting of a
second-countable, locally Euclidean space \(\mathcal{M}\) together with a
differentiable structure \(\mathcal{F}\) of class \(C^k\). (The \(C^k\) condition can be generalised to \(C^\infty\), complex analytic, etc.)